Etapa de entrada. Se encarga de suministrar la señal que debe procesar el equipo de tratamiento. Pueden ser micrófonos u otros equipos electrónicos como reproductores de audio y receptores de radio.
Etapa de entrada. Se encarga de suministrar la señal que debe procesar el equipo de tratamiento. Pueden ser micrófonos u otros equipos electrónicos como reproductores de audio y receptores de radio.- Etapa de tratamiento electrónico. Se encarga de adecuar las características de la señal de sonido que suministra la fuente de sonido a las características del transductor o etapa de salida.
- Etapa de salida. Se encarga de convertir la señal eléctrica trataba en la etapa de procesamiento en otro tipo de señal. Normalmente se trata de altavoces
 Micrófono. Transductor electro acústico que se encarga de transformar la energía acústica que incide en el en energía eléctrica.
Micrófono. Transductor electro acústico que se encarga de transformar la energía acústica que incide en el en energía eléctrica.- Reproductor de CDs. Dispositivo de lectura óptico que permite la reproducción de discos compactos (CD).
- Sintonizador de radio. Equipo encargado de captar la señal que proviene de misiones radioeléctricas, de FM o de AM.
- Otras fuentes de sonido. Actualmente, son multitud los dispositivos de son capaces de proporcionar una señal de audio: Mp3, TV, reproductor de DVD, cámara de video, etcétera.
| Sensibilidad | Respuesta en frecuencia |
| Directiva | Impedancia interna |
| Ruido de fondo | Rango dinámico |
| Distorsión | |
 y generalmente el fabricante especifica este valor a una frecuencia de 1 kHz.
y generalmente el fabricante especifica este valor a una frecuencia de 1 kHz.
La sensibilidad también puede expresarse en decibelios (dB), cuando se toma como referencia una sensibilidad de  :
:

Cuando es necesario conocer la sensibilidad en V/Pa se recurre a la siguiente expresión:

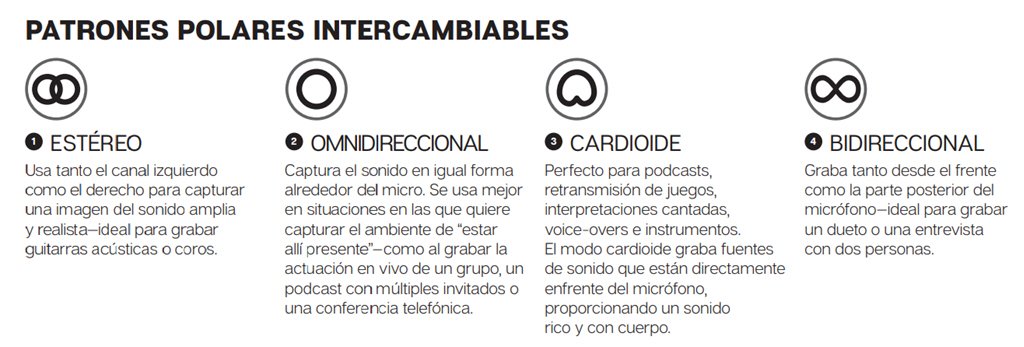
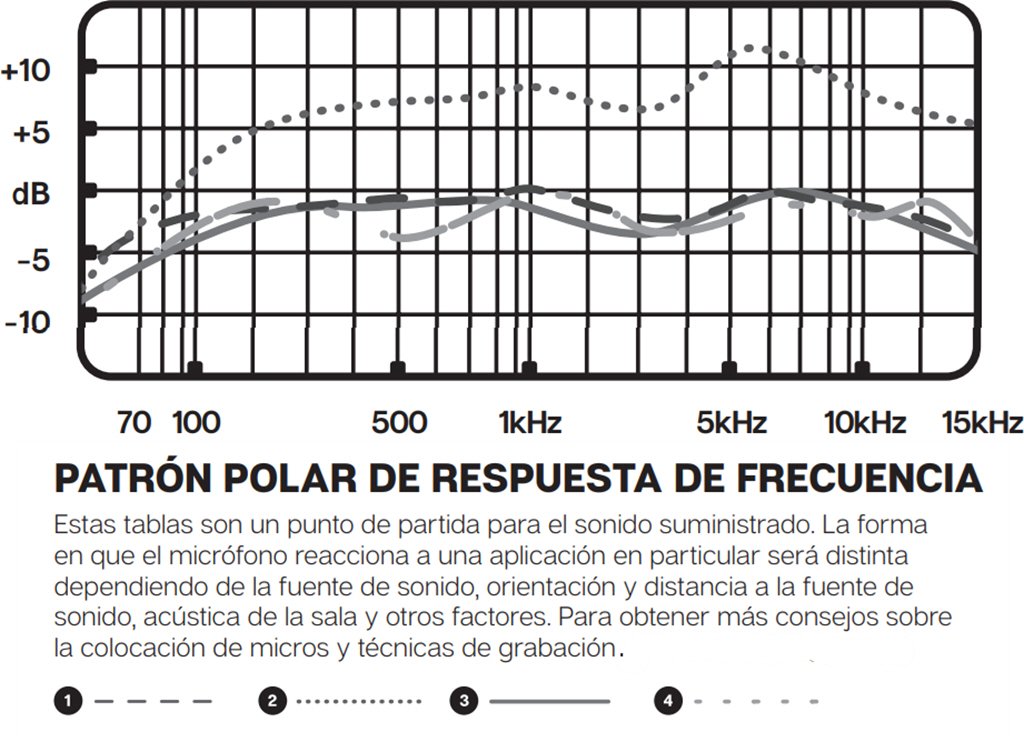
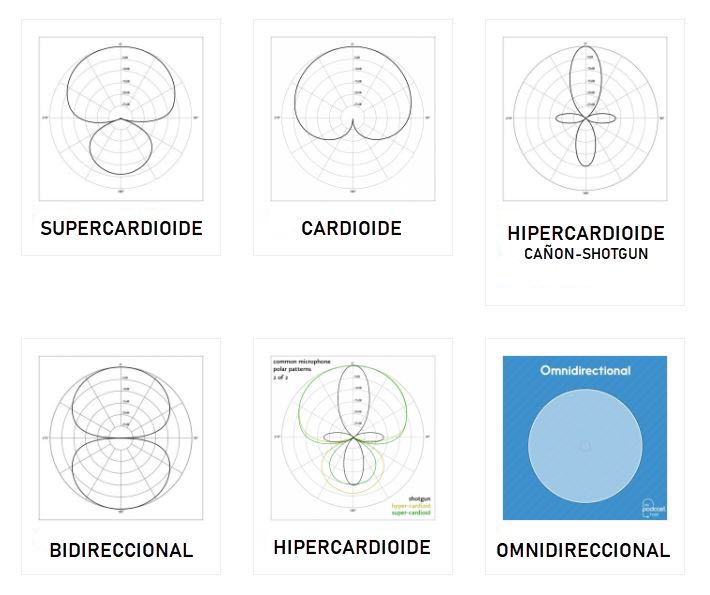
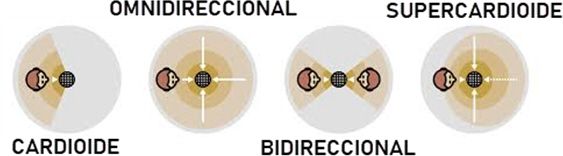
El diagrama polar permite la clasificación de los micrófonos en función de la forma de su curva. Las curvas típicas de digestibilidad de un micrófono son las siguientes:
 Omnidireccional. Este tipo de micrófono capta el sonido de manera uniforme en todas las direcciones, por lo que su sensibilidad no varía con el ángulo de incidencia de la onda sonora. Esta respuesta ideal para captar el sonido ambiente de en lugares abiertos.
Omnidireccional. Este tipo de micrófono capta el sonido de manera uniforme en todas las direcciones, por lo que su sensibilidad no varía con el ángulo de incidencia de la onda sonora. Esta respuesta ideal para captar el sonido ambiente de en lugares abiertos.- Bidireccional. Proporcionar la máxima sensibilidad al sonido que proviene de la parte frontal y su opuesta, disminuyendo en los laterales. Es un micrófono idóneo para ser utilizado entre dos locutores enfrentados, ya que atenúa las señales que proceden de los lados.
- Unidireccional. Este tipo de micrófono tiene muy buena sensibilidad a los sonidos que proceden de punto situado delante del micrófono, atenuando los sonidos procedentes de la parte posterior. Como sólo recogen los sonidos frontalmente, se utilizan en ambientes ruidosos cuando sólo es necesario captar el sonido de una fuente, y eliminar los sonidos no deseados. En función de su directividad, se clasifican de las maneras siguientes:
 Cardioide. Recibe este nombre debido a que su diagrama tiene forma de corazón. es un tipo de micrófono unidireccional y poco sensible a los sonidos que proceden de los laterales, presentando prácticamente un nulo de sensibilidad en la parte trasera.
Cardioide. Recibe este nombre debido a que su diagrama tiene forma de corazón. es un tipo de micrófono unidireccional y poco sensible a los sonidos que proceden de los laterales, presentando prácticamente un nulo de sensibilidad en la parte trasera.- Hypercardioide. Es más direccional que el cardioide, logrando una sensibilidad muy grande en el eje principal, pero a costa de aumentar la sensibilidad por la parte posterior. Se utiliza en lugares de mucho eco para rechazar la señal reflejada.
- Supercardiode. Tipo intermedio entre el micrófono cardioide y el bidireccional, ya que su sensibilidad no es nula en la parte posterior.
 Micrófonos de alta impedancia. Este tipo de micrófono tiene un valor de impedancia de salida muy grande, superior a 1 kΩ, y proporciona un valor de tensión de salida relativamente alto, comprendido entre 10 mV y 30 mV. Debido a que las pérdidas que introducen en la línea de transmisión son elevadas, debe utilizarse junto con un cable de conexión de longitud reducida, nunca superior a los 10 m, por lo que en la práctica se utiliza muy poco.
Micrófonos de alta impedancia. Este tipo de micrófono tiene un valor de impedancia de salida muy grande, superior a 1 kΩ, y proporciona un valor de tensión de salida relativamente alto, comprendido entre 10 mV y 30 mV. Debido a que las pérdidas que introducen en la línea de transmisión son elevadas, debe utilizarse junto con un cable de conexión de longitud reducida, nunca superior a los 10 m, por lo que en la práctica se utiliza muy poco.- Micrófonos de baja impedancia. Este tipo de micrófonos presentan una impedancia de salida comprendida entre 100 ohmios y 600 ohmios y, aunque suministra una tensión de salida reducida (entre 0,5 mV y 2 mV) se pueden utilizar junto con cables de conexión de gran longitud, típicamente hasta 100 m, siempre y cuando se utilice un cable apantallado de buena calidad.
Para poder comparar diferentes tipos de micrófonos utiliza un parámetro denominado nivel de ruido equivalente, que especifica el nivel de presión sonora de entrada ficticio que es capaz de generar el mismo nivel de salida que el ruido de fondo generado. Normalmente, este dato se suministra utilizando para la medida de la curva de ponderación A. Su valor típico está en torno a 10 y 20 dB.
Muchos fabricantes proporcionan el nivel de ruido de un micrófono a partir de las especificaciones de la relación señal/ruido.
La relación señal/ruido (S/N) o SNR (Signal Noise Ratio) evalua el nivel de señal útil de salida del micrófono en relación al ruido de fondo que este genera. Cuanto mayor sea la relación S/N del micrófono, más inmune al ruido será un micrófono. Se expresan decibelios y valores típicos son los comprendidos entre 70 y 80 dB.
Este parámetro vendrá determinado por el nivel de presión sonora máxima de entrada (máximo señal de salida) y el nivel de ruido equivalente del micrófono.
La distorsión se expresa en tanto por ciento (%) como relación entre el nivel de distorsión de la señal de salida y el nivel de la señal útil. La proporción de distorsión de un micrófono viene indicada como THD (Distorsión Armónica Total) para una expresión máxima SPL determinada. Generalmente no debe superar el 1%.
La señal de salida de un micrófono viene limitada por el nivel de salida máximo que puede proporcionarte sin generar distorsión. Por ello, el fabricante especifica el nivel de presión sonora máximo de entrada que puede aplicarse al micrófono sin producir un distorsión apreciable.
Por ejemplo, el nivel de presión sonora máximo de un micrófono está en torno a 140 dB para una distorsión THD de 0,5 %. Para niveles de presión sonora de entrada mayores, la señal de salida presenta demasiada distorsión.
 Transductor acústico-mecánico (TAM) . Convierte las variaciones de presión sonora en variaciones de la posición de una membrana. Este transductor define el principio de funcionamiento del micrófono.
Transductor acústico-mecánico (TAM) . Convierte las variaciones de presión sonora en variaciones de la posición de una membrana. Este transductor define el principio de funcionamiento del micrófono.- Transductor mecánico-eléctrico (TEM) . Convierte las variaciones del movimiento de la membrana en una señal eléctrica de salida. Permite clasificar los micrófonos en función del transductor utilizado.
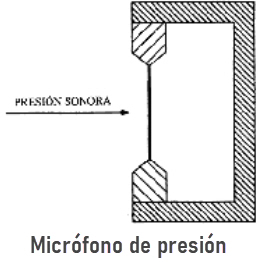
 Micrófono de presión.La carcasa de este tipo de micrófono está completamente cerrada y en uno de sus lados se sitúa la membrana o diafragma. La cara posterior del diafragma está sometido a la presión ambiental, mientras que la cara anterior está expuesta a las variaciones de presión instantánea del aire provocadas por el sonido. La diferencia de presiones entre las dos caras del diafragma provoca su movimiento, siendo su respuesta la que corresponde un micrófono omnidireccional.
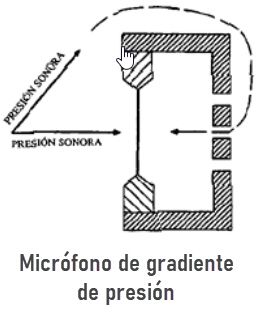
Micrófono de presión.La carcasa de este tipo de micrófono está completamente cerrada y en uno de sus lados se sitúa la membrana o diafragma. La cara posterior del diafragma está sometido a la presión ambiental, mientras que la cara anterior está expuesta a las variaciones de presión instantánea del aire provocadas por el sonido. La diferencia de presiones entre las dos caras del diafragma provoca su movimiento, siendo su respuesta la que corresponde un micrófono omnidireccional.- Micrófono de gradiente de presión.En este tipo de micrófono la carcasa también está abierta por su cara posterior, de manera que la membrana vibra debido a la diferencia de presiones (gradiente) que existe entre sus dos caras. Este tipo de micrófono es bidireccional, ya que proporciona un máximo desplazamiento del diafragma cuando la onda llega sobre el eje del micrófono, y su desplazamiento es mínimo o nulo cuando las ondas inciden lateralmente.
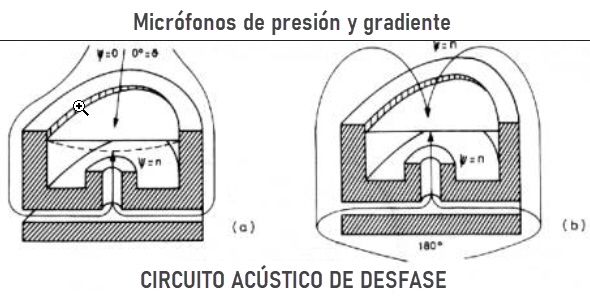
- Micrófono de presión y gradiente. Este tipo de micrófono se basa en el efecto combinado de los micrófonos de presión y los de gradiente, de manera que se consigue controlar el desfase entre la onda incidente y la posterior, con el objetivo de conseguir una característica unidireccional (cardioide), proporcionando una respuesta máxima para la captación anterior y mínima para la posterior.
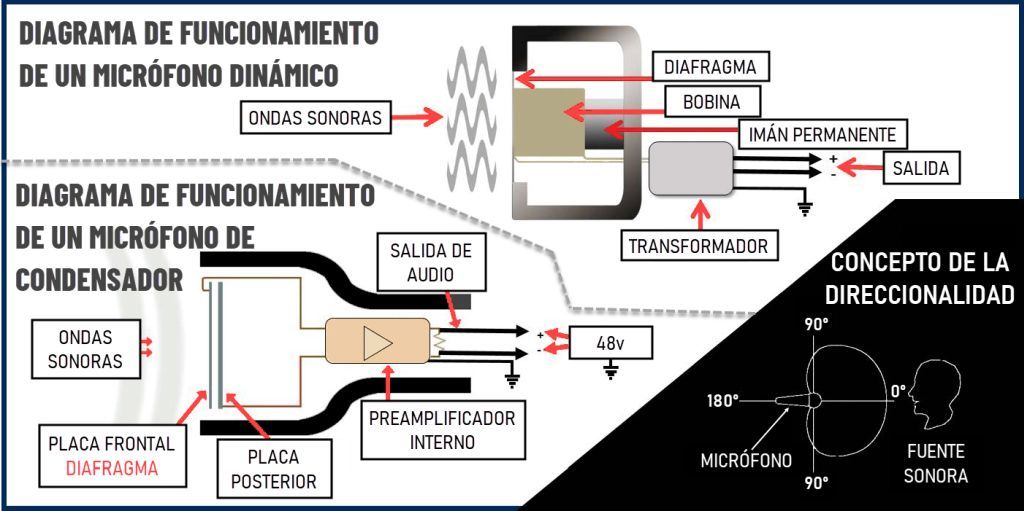
- Electromagnéticos. Se basan en el fenómeno de la inducción electromagnética para generar una señal eléctrica proporcional al movimiento del diafragma. los dos tipos de micrófonos que se basan en este fenómeno son los micrófono dinámico y lo micrófono de cinta:
- Micrófono dinámico. Estos micrófonos también se denominan de bobina móvil ya que su principio de funcionamiento se basa en la generación de una tensión inducida en el extremo de una bobina que se mueve sobre un imán permanente debido a la presión acústica ejercida sobre ella. La impedancia de este tipo de micrófonos es baja (entre 150 ohmios y 600 ohmios) y su respuesta en frecuencia aceptable en toda la banda audible. Además de ser económicos, tiene la ventaja de que no necesitan alimentación eléctrica. Como principal inconveniente es su baja sensibilidad, con valores típicos de
 a
a  .
. - Micrófonos de cinta. estos micrófono se basan en el mismo principio de funcionamiento de los dinámicos. Las funciones de la membrana la realiza una cinta metálica de aluminio, que se encuentra situada entre los polos de un imán permanente, de manera que vibra en función de la presión acústica incidente, generando una tensión proporcional a la presión ejercida. Tienen menor sensibilidad que los micrófono de bobina móvil, su respuesta en frecuencia uniforme de 50 a 15.000 Hz y tiene características bidireccionales. Son dispositivos que presentan baja impedancia, por lo que necesitan de un transformador de adaptación con elevada relación de transformación, para conseguir una impedancia de salida en torno a los 200 ohmios. Debido a su elevado precio, se utilizan poco.
- Micrófono dinámico. Estos micrófonos también se denominan de bobina móvil ya que su principio de funcionamiento se basa en la generación de una tensión inducida en el extremo de una bobina que se mueve sobre un imán permanente debido a la presión acústica ejercida sobre ella. La impedancia de este tipo de micrófonos es baja (entre 150 ohmios y 600 ohmios) y su respuesta en frecuencia aceptable en toda la banda audible. Además de ser económicos, tiene la ventaja de que no necesitan alimentación eléctrica. Como principal inconveniente es su baja sensibilidad, con valores típicos de
- Electroestáticos. Se basan en las propiedades de los condensadores para almacenar energía eléctrica. Los dos tipos básicos de micrófono que se basan en este fenómeno son los micrófonos de condensador y el micrófono electret:
- Micrófono de condensador. Este tipo de micrófono se basa en un condensador plano de placas paralelas: una de las placas fija y la otra está formada por una membrana móvil que capta la onda sonora. La capacidad del condensador varía en función de la distancia entre las placas que depende de la presión acústica que incide en la membrana móvil del micrófono. El condensador se conecta una resistencia para formar un divisor de tensión, de manera que la caída de tensión en borne de ella dependerá de la capacidad del condensador.Este tipo de micrófono en necesita una tensión de alimentación externa para su correcto funcionamiento, que se suministra normalmente desde el exterior a través del propio cable de conexión por donde se transmite la señal. Este proceso recibe el nombre de alimentación fantasma (phantom). Los valores típicos de alimentación de este tipo de micrófonos son los comprendidos entre 9 y 48 voltios (9, 12, 24, 48). Sobre el propio micrófono se montó un pre amplificador, con baja impedancia de salida que proporciona una elevada sensibilidad, normalmente entre
 y
y  . Los micrófonos de condensador se fabrican con características polares unidireccionales, bidireccionales y unidireccionales. La ventaja de este tipo de micrófonos son una respuesta plana en frecuencia, gran sensibilidad y una buena relación señal/ruido. Además son poco sensible a las vibraciones mecánicas. Como inconveniente, además de su elevado coste económico, la necesidad de suministrar la alimentación eléctrica a través del cable de conexión.
. Los micrófonos de condensador se fabrican con características polares unidireccionales, bidireccionales y unidireccionales. La ventaja de este tipo de micrófonos son una respuesta plana en frecuencia, gran sensibilidad y una buena relación señal/ruido. Además son poco sensible a las vibraciones mecánicas. Como inconveniente, además de su elevado coste económico, la necesidad de suministrar la alimentación eléctrica a través del cable de conexión. - Micrófono electret. el principio de funcionamiento de este micrófono es similar al del condensador, excepto que en este caso la placa fija del condensador se realiza con un polímero polarizado eléctricamente que se denomina electret. Estos micrófonos presentan características parecida a los de condensador, pero tienen menor sensibilidad y su respuesta a la baja frecuencia el más pobre.
- Micrófono de condensador. Este tipo de micrófono se basa en un condensador plano de placas paralelas: una de las placas fija y la otra está formada por una membrana móvil que capta la onda sonora. La capacidad del condensador varía en función de la distancia entre las placas que depende de la presión acústica que incide en la membrana móvil del micrófono. El condensador se conecta una resistencia para formar un divisor de tensión, de manera que la caída de tensión en borne de ella dependerá de la capacidad del condensador.Este tipo de micrófono en necesita una tensión de alimentación externa para su correcto funcionamiento, que se suministra normalmente desde el exterior a través del propio cable de conexión por donde se transmite la señal. Este proceso recibe el nombre de alimentación fantasma (phantom). Los valores típicos de alimentación de este tipo de micrófonos son los comprendidos entre 9 y 48 voltios (9, 12, 24, 48). Sobre el propio micrófono se montó un pre amplificador, con baja impedancia de salida que proporciona una elevada sensibilidad, normalmente entre
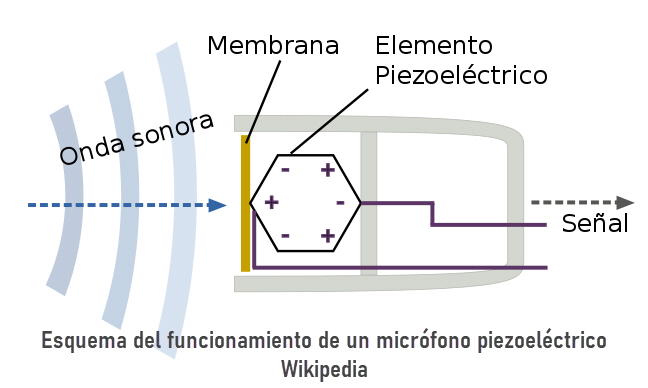
- Piezoeléctricos. Se basa en el fenómeno piezoeléctrico para generar una señal eléctrica proporcional a la presión ejercida sobre un material piezoeléctrico. Para ello se utilizó una lámina de cuarzo u otro material piezoeléctrico que debido a la deformación que sufre cuando incide una onda sonora, genera una tensión eléctrica de salida. Debido a que presenta una alta impedancia de salida, necesita un transformador cuya función es realizar la adaptación de impedancias. Su respuesta frecuencia es insuficiente para utilizarse en sistema de grabación profesional, por lo que se utiliza sólo en micrófonos pequeños para voz.
- Otros. cualquier transductor capaz de provocar variaciones en la tensión de salida se puede utilizar en un micrófono. Por ejemplo, el micrófono de carbón Se basa en la variación de la resistencia que presenta una cápsula repleta de partículas de carbón, cerrada por el diafragma. Cuando la membrana del diafragma se mueve por la acción de la presión sonora, las partículas de carbón se comprimen en mayor o menor medida, modificando la resistencia eléctrica que presenta la cápsula micrófonica. La variación de la resistencia se convierte en una variación de tensión mediante un circuito divisor de tensión, alimentado por una fuente de alimentación. Esto micrófono necesitan alimentación eléctrica y tienen una calidad y respuestas frecuencia pobre, pero todavía se utilizan debido que son baratos. su aplicación típica solo micrófono para teléfonos y porteros electrónicos.